
Le métier de contrôleur aérien regorge d’acronymes en tout genre et suivre une conversation peut s’avérer compliqué. Voici donc quelques acronymes assez courants, des concepts de base et une petite explication pour illustrer…
Continuer la lecture

Le métier de contrôleur aérien regorge d’acronymes en tout genre et suivre une conversation peut s’avérer compliqué. Voici donc quelques acronymes assez courants, des concepts de base et une petite explication pour illustrer…
Continuer la lecture

Il serait difficile de prétendre que les évolutions technologiques sont régulières et rapides dans le métier. La France a longtemps eu un rôle moteur mais elle semble plutôt à la traîne depuis quelques années. Pourtant au printemps 2022, le centre de Reims a basculé vers un nouveau système: 4-Flight. Et le 6 décembre 2022 aura été le tour du centre d’Aix-en-Provence…
Continuer la lecture
Voici donc plus d’un an que nous travaillons sur ce nouveau système…

En fouillant dans mes archives, je me suis rendu compte que le projet « simulateur » remontait à 2012… Tant pis mais je viens de me relancer sur cette idée avec une volonté un peu plus orientée vulgarisation qu’avant. En espérant que cette fois soit la bonne. L’avantage d’avoir un objectif réel ne pourra qu’aider.
Continuer la lecture
Continuer la lectureComme nous l’avons vu dans un article précédent, les secteurs de contrôle disposent d’une capacité limitée et pour garantir la sécurité, il peut s’avérer nécessaire de limiter le trafic en mettant en place des régulations. Ces dernières ont cependant des limites…
Continuer la lectureDans la série des expressions, « cela ne va pas lui boucher un réacteur » figure dans mes favorites. Mais finalement que sous entend un contrôleur lorsqu’il utilise cette expression ?
Continuer la lectureAu delà de quelques mouvements de grèves, de nombreux pilotes semblent manifester un certain agacement à voir les délais (et donc retards) qu’ils subissent. Chaque retard nuit d’une part à la ponctualité globale des compagnies mais aussi au bon fonctionnement du système de « hub » et donc des correspondances. Ces délais s’expliquent en partie par un problème de capacité mais que recouvre cette notion ?

Continuer la lectureLa turbulence de sillage constitue un phénomène important pour le monde aéronautique car ce phénomène génère des surcoûts d’exploitation et des risques en matière de sécurité ce qui impacte les contrôleurs aériens. Dans quelle mesure ? Et bien, penchons nous justement sur le sujet.
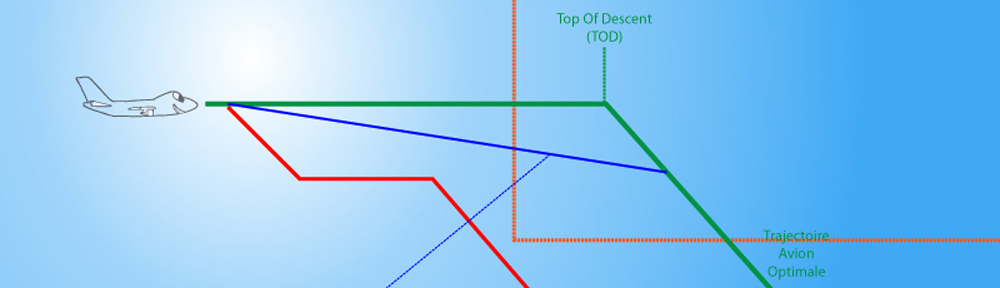
Continuer la lectureEn lisant une tentative de vulgarisation sur ce fameux métier de contrôleur aérien, un compte twitter évoquait l’expression « appuyer sur la tête » et, effectivement, cela mérite une explication…
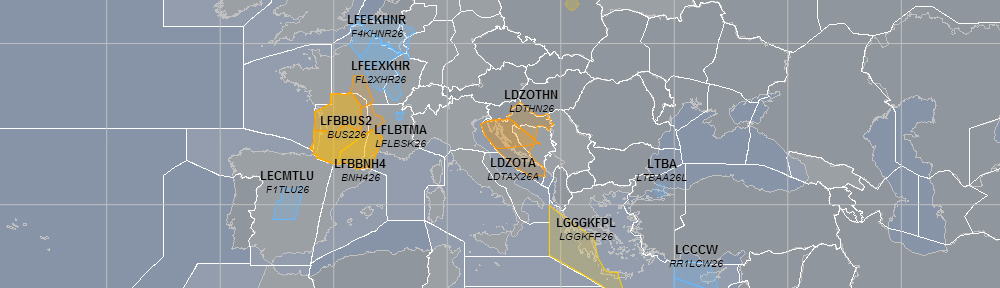
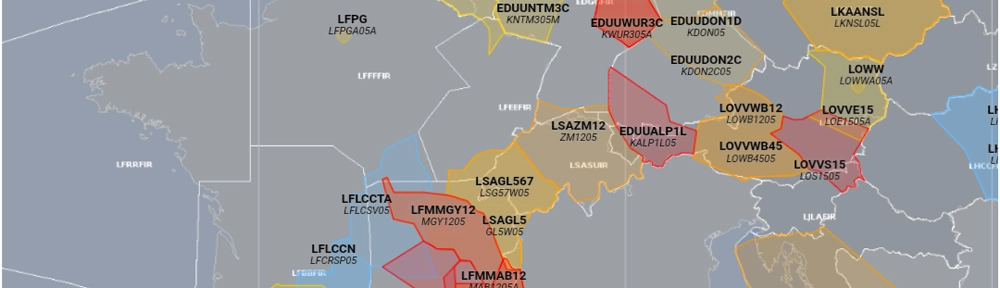
Continuer la lectureLors d’un vol, un pilote avait annoncé aux passagers que nous partirions en retard car les contrôleurs aériens refusaient de le laisser partir… Contrairement au sous entendu de ce pilote, il ne s’agissait pas d’un caprice mais bien de la volonté de faire respecter un créneau pour s’assurer qu’un espace aérien ne sature pas au point de mettre la sécurité en jeu. Il est assez difficile de savoir ce qui se passe réellement mais un outil d’Eurocontrol permet d’en avoir un bon aperçu : le portail du NOP (Network Operations Portal).
Continuer la lectureFaute de temps, il faut trouver des occupations « en pointillés »… Ainsi, malgré de nombreuses interruptions, ma poursuite radar fonctionne enfin… Non, vous n’assistez pas à la naissance d’un nouveau prestataire de contrôle aérien ! En fait, cela rejoint le projet de simulateur qui devait pouvoir être alimenté avec des vraies pistes. J’avais en effet entendu parler de petites stations « radar » « abordables ». En pratique, deux choses m’ont permis d’aller plus vite tout en limitant le coût : le Raspberry Pi et une clé USB Tuner TV.

Continuer la lectureDans un précédent post, nous avions évoqué la notion de secteur de contrôle, un découpage spécifique aux centres en route même si un équivalent existe aussi dans les approches. Dans ce post, je vous propose d’étudier de plus près l’organisation du travail sur un secteur de contrôle.

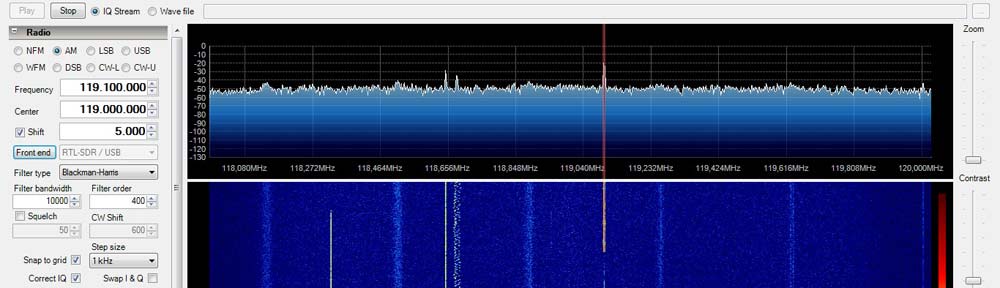
Depuis maintenant quelques années, les contrôleurs aériens tout comme les pilotes professionnels travaillent avec le 8.33 mais en quoi cela consiste-t-il exactement ?
Continuer la lecture